MAYA教程-角色骨骼设置
作者:网友整理
Autodesk mayav1.7 113.83M / 简体中文
点击下载
玛雅maya最新网站地址1.1.71.8.7 58.79M / 简体中文
点击下载
加查骨骼动画制作软件GachaAnimatorvBeta 1.14.3 134.31M / 简体中文
点击下载骨骼的POSE,也就是所说的T POSE,这便是角色动画前作为骨骼绑定的标准动作,一般这样的T POSE有两种。
Tpose(1)和Tpose(2)除了两只胳臂以外,其余都使一样的。
如各位看到的Tpose(1)的手臂是完全平展开的。
这是有他的道理的,目的是能够使在上臂的动画更加的自由抬起(象“举重的动作”)。
而Tpose(2)的原因是什么呢?如我们所知道的,在实际中我们抬起胳膊到“举重的动作”的机会并没有多少,所以象那么大的活动范围也便是不需要的了。象Tpose(2)这样的上臂和躯干所形成的角度是比较容易处理在腋下的权重的。这样实际上也就是提高了工作的效率。
但是,无论是Tpose(1)还是Tpose(2)在骨骼的设置上都有着同样的要求。好象是不同的动物不同的物种,但是基本的生物规则是相同的一样。
在骨骼的设置方面我有一些好的建议。
胳臂,也是骨骼中最有代表性的关节了,在做关节的时候我们要保证几点要求。
1).关节的位置。
既是,在骨头和骨头衔接的地方是否得当。什么样的位置才是得当呢?象是胳臂这样的关节我提倡在关节的中心位置,在这样的位置时,胳臂做运动的时候就不会有明显的拉伸的现象出现了,拉伸现象的减小可以使动画看起来更自由,更真实。
2).骨骼的布置,
动画骨骼的位置往往和真正的骨头的位置不同。甚至会有很大的区别。原因就是我们不会做每一个动画都需要很全面的骨骼,象在手的位置掌骨的设置,还有在前臂的位置尺骨的设置一般不会追求和真实的骨骼一致。
3).骨骼的实际作用。
一般每根骨骼都使因为有正确的“作用”才会出现在角色的身上,也就是说我们不会去考虑“反关节”,也不会去考虑“无法实现”的动画,和错误的动画效果。例如:在肘的部分前臂是不会向后折的(畸形的除外),所以也就没必要去做前臂向后折的的动画测试,以及动画的准备。 
当然啦~在脊柱的骨骼就要贴近脊柱的位置(稍稍有点*后),
在骨骼的位置设定时有如下方法:
可以借助Insert键功能,只移动需要移动的Joint,而不会移动关联的Joint。
通常对于一个较为对称的模型会采用同样对称的骨骼系统,象这样的只需要做一边的骨骼然后静像这个骨骼就可以了。Skeleteon>Mirror Joint
还有的就是在骨骼的位置确定以后千万要记得Orient一下所有的Joint哦~
是的在骨骼的设置方面由着很多的方法。
这里说的是骨骼在脚部分的设置。
首先,将脚的骨骼分为4个部分,既大腿,小腿,脚掌和前前脚掌(脚趾和脚趾的轴点)。
像这样划分就得出了需要的骨骼,以及骨骼的基本位置。
先将骨骼的位置确保了,之后做腿部的IK,这个IK和胳膊IK有些区别,
通常腿有个比较难缠的问题,就是“踮脚”的动作,以及所有类似的动作。
IK需要一个控制,就是控制IK的位移属性,但是在这里将使用的是父子关系。 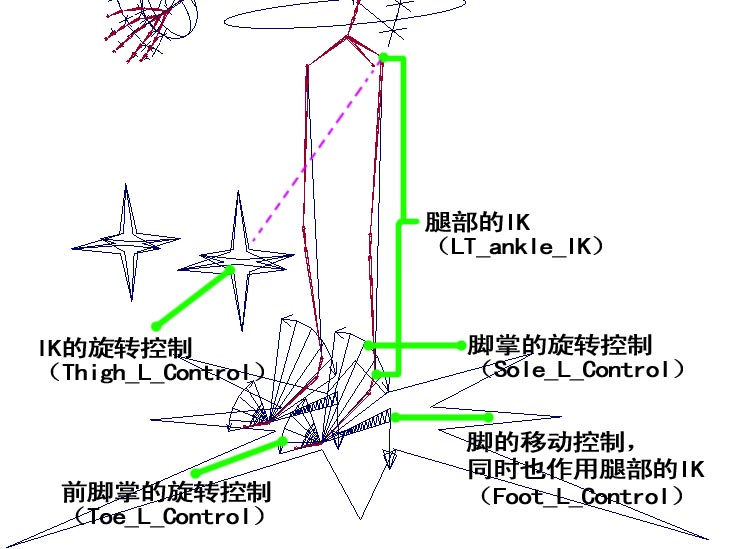
这是他们的层级关系
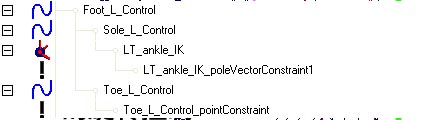
toe_L_Control控制前脚掌的旋转同时也被前脚掌控制自己的位移
Foot_L_control是Sole_L_Control、Toe_L_Control和LT_ankle_ik的父级
好了,现在可以分别控制这些控制器动画一下看看了~
开始第一步的设置,首先我们要有一副完整的并且符合我们要求的骨骼。
我的如下图: 
当然了,这个骨骼是根据要求制作的,所以会有很多的控制器。
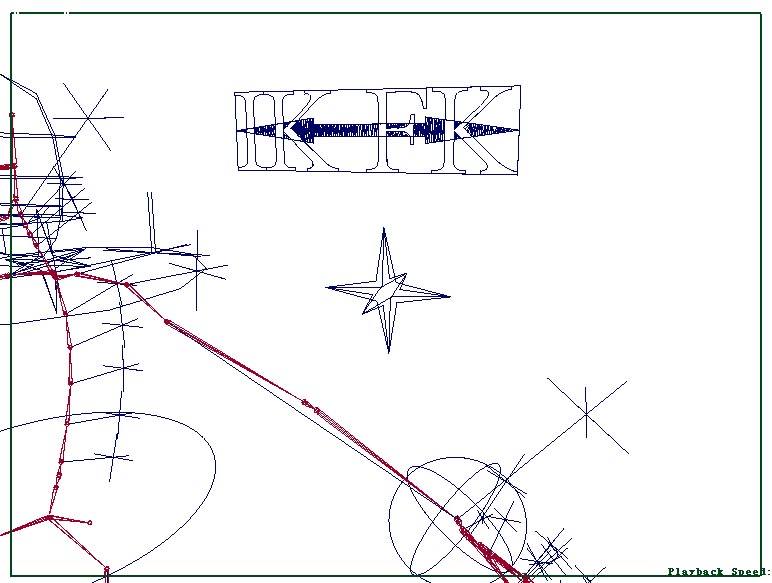
在胳膊的位置要作IK和FK的转换控制。
首先,先要创建出来一个线性的操纵物体,就象我作的这个东西。^_^!
之后在这个东西的通道上作些修改。
可以选择这个物体(就是那个线作的东西)IK/FK,然后打开
Modify>Add Attribute...
为IK/FK添加几个属性
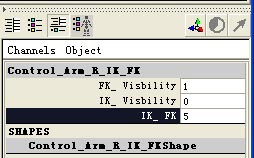
分别为Float的FK_Visbility、IK_Visbility和IK_FK
其中为FK_Visbility和IK_Visbility的范围都设定为0~1
而IK_FK的范围设定为0~5
之后再打开Window>General Editors>Channel Control...
我们在Keyable中Move掉原来的属性通道,包括translate(移动)、rotate(旋转)、scale(缩放)和Visibility(显示)。
并且把translate、rotate和Visibility要Lock
这样IK/FK的通道显示如下图:
打开Animate>Set Deiven Key >Set
(在这里比较麻烦,所以希望大家要有点耐心,谢谢合作)
设置驱动关键桢
选择IK/FK
将它Load Driver
选择它所对应的IK,将它Load Driven
设置当IK_FK等于“0”的时候IK的Ik Blend项等于"1"。
当IK_FK等于“5”的时候IK的Ik Blend项等于"0"。
现在,这个IK、Fk转换设置基本完成。
在这里我们还有两项没有用到,分别为FK_Visbility和IK_Visbility,
这个是用来方便控制的,他们的使用方法如下:
打开Window>General Editors>Connection Editor...
用A的Visbility控制B和C的相同项,
同样在这里,用IK/FK的FK_Visbility控制A的Visbility项。
再以IK/FK的IK_Visbility项控制D的Visbility项。
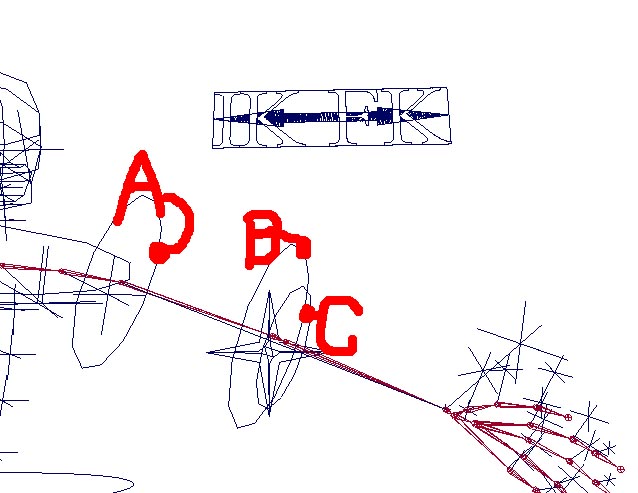

在这个骨骼的胳臂我使用了3节骨头,前面没说明这里,不好意思。
这3个骨头的位置分别在上臂、肘和前臂,我在每一个骨头的原点位置都做了一个环,就如上图的上图,“A”、“B”和“C”,用他们分别操纵上臂、肘和前臂的旋转,再在这个基础上建立一条由上臂到前臂的IK,这样就完成了初步的创建。
在这3个环的属性通道里只保留了旋转,这么一项。
移动均是被所操纵的骨骼所控制。
后面要做的事情就比较简单了,只需要在IK/FK自己的属性里做驱动关键贞,位置有提过。
打开Animate>Set Deiven Key >Set
在这个里面(刚刚用过,大家不会陌生吧~)
选择IK/FK
将它Load Driver
同样也将IK/FK Load Driven
换句话说就是让他自己的属性操纵自己的属性,从而相成关联的动画。
这里的目的说明:需要在这里实现,当我们需要IK做动画的时候,将FK的操纵器(就是A、B和 C)隐藏,而当我们需要FK的时候,也要将IK的操纵器(D)隐藏,这个D是控制该IK的位移属性的。
那么就需要象如下的操作,前面已经将FK_Visbility和IK_Visbility做了属性的关联,现在需要将这些属性由IK_FK项一同控制。
也就是在IK_FK为0的时候显示IK的操纵器,在IK_FK为5的时候显示FK的操纵器。
IK_Visbility为1, IK_FK为0
IK_Visbility为0, IK_FK为4.95
FK_Visbility为0, IK_FK为0.05
FK_Visbility为1, IK_FK为5
就是这样,现在准备已经结束,可以操作一下IK/FK的IK_FK项0到5动画一下,看看是否可以正确按照需要动画。
加载全部内容